- рулевой привод
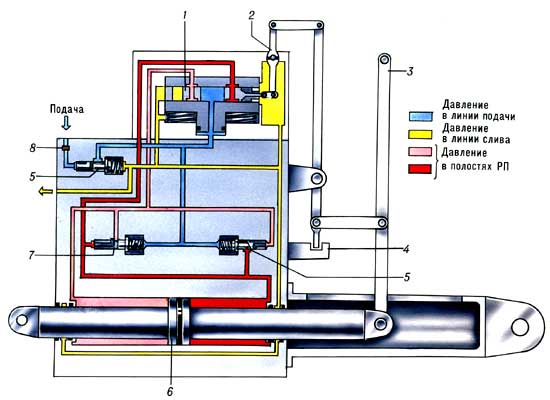
Принципиальная схема рулевого привода с дроссельным регулированием.
рулево́й при́вод — гидравлическое, пневматическое, электрическое энергосиловое устройство, приводящее в движение органы управления летательного аппарата, в соответствии с маломощными управляющими сигналами от рычагов управления пилота или бортовых автоматических систем управления. В структурном отношении Р. п. представляет собой следящую систему с положительной обратной связью.
Р. п. выполняют следующие функции: преобразование сигналов (с усилением по мощности) системы рычагов управления в соответствующее отклонение рулевой поверхности, увеличение демпфирования выходной части системы управления рулями, обеспечение безопасности от форм флаттера, возникновение которых в основном зависит от рулевых поверхностей, обеспечение необходимого уровня надёжности управления.
Наибольшее применение в авиации получили гидравлические Р. п., обладающие большей удельной мощностью (при мощностях свыше 0,3 кВт) и лучшей возможностью стыковки с взаимодействующими механическими и электрическими системами, плавностью и широким диапазоном регулирования скорости выходного звена. Они могут включать источник гидравлического питания (автономные Р. п.) или получать энергию от централизованной одной или нескольких бортовых систем гидравлического питания летательного аппарата (см. Гидравлическое оборудование). В зависимости от способа управления скоростью движения выходного звена гидравлического Р. п. могут быть с объёмным регулированием — скорость выходного звена регулируется изменением рабочего объёма насоса или (и) двигателя, и с дроссельным регулированием — скорость выходного звена регулируется изменением проводимостей дросселей во входных и (или) выходных трубопроводах гидродвигателя, при этом в случае применения нерегулируемого насоса часть подаваемой рабочей жидкости отводится через дроссель или клапан на слив, минуя гидродвигатель (см. рис.). В качестве исполнит, гидродвигателей в Р. п. используются гидравлические цилиндры, поворотные гидродвигатели. В последнем случае в состав выходной части системы управления должны дополнительно включаться винтовые преобразователи вращательного движения в поступательное.
Для обеспечения высокой отказобезопасности системы управления полётом Р. п., как правило, выполняются многоканальными, питающимися от нескольких гидросистем, то есть применяется резервирование. При этом резервирование может быть как общим, так и разделённым.
С целью улучшения рабочих характеристик и габаритно-весовых показателей автоматических и электродистанционных систем управления, а также обеспечения управления от электрических сигналов электродистанционных или автоматических систем совмещённого управления с управлением через механическую проводку получили применение комбинированные Р. п. Такие Р. п. включают гидромеханический исполнительный механизм, электрогидравлический сервопривод, устройства, обеспечивающие совмещение (взаимоисключение) указанных режимов управления, устройства механических и электрических обратных связей и другие необходимые элементы.
Появление промышленных электродвигателей с постоянными магнитами, обладающих высокой удельной мощностью и малыми моментами инерции, открывает путь к практическому созданию чисто электрических Р. п. (с бесколлекторными электродвигателями и электронной коммутацией силовых цепей), по своим характеристикам приближающихся к электрогидравлическим приводам. Таким образом, наметилась возможность создания летательных аппаратов с единой (электрической) энергетической системой, что в целом обеспечивает повышение надёжности системы управления, снижение её массы и сокращение эксплуатационных расходов.
С. А. Ермаков, М. П. Селиванов.
Энциклопедия «Авиация». - М.: Большая Российская Энциклопедия. Свищёв Г. Г.. 1998.